传感器:CMOS / CCD / 单色 / OSC
传感器(image sensor)是把入射光子转换为可量化电信号的器件,是天文相机的核心。它的几项物理指标——量子效率、读出噪声、暗电流、满阱容量、像元尺寸——共同决定了一台相机在长曝光下能记录到怎样的信号与噪声。本页先介绍两类传感器架构(CMOS 与 CCD)和两种取色方式(单色与彩色),再逐项说明关键性能参数,最后区分专用天文相机、改机单反/微单与行星相机三类设备的定位。理解这些参数,有助于在选购、规划拍摄与后期处理时做出量化判断,相关概念可对照信噪比与光学基础。
传感器的基本工作过程
Section titled “传感器的基本工作过程”无论 CMOS 还是 CCD,基本物理过程相同:
- 光电转换:入射光子在硅基光电二极管(photodiode)中通过光电效应激发出光电子(photoelectron),电子被收集并存储在像元(pixel)的势阱中。能否产生电子由**量子效率(quantum efficiency, QE)**决定。
- 电荷积累:曝光期间像元持续积累电子,直到积累的电子数达到上限,即满阱容量(full well capacity)。
- 读出:曝光结束后将电荷转换为电压,经放大器和**模数转换器(analog-to-digital converter, ADC)**量化为数字读数,单位为 ADU(analog-to-digital unit,模数转换单位)。
- 噪声叠加:读出过程引入读出噪声(read noise);曝光期间热运动产生暗电流(dark current)。
两类传感器的根本差别在于第 3 步——电荷如何被读出。
CMOS 与 CCD
Section titled “CMOS 与 CCD”**CCD(charge-coupled device,电荷耦合器件)**采用模拟移位寄存器结构:曝光后,每一行的电荷被逐行”传递”到芯片边缘的少数几个放大器,统一转换为电压。整块芯片共用同一套读出链路,因而均匀性极高,但读出速度慢。
CMOS(complementary metal-oxide-semiconductor,互补金属氧化物半导体)为有源像素传感器(active-pixel sensor, APS):每个像元自带放大电路,电荷在像元处就近转换为电压,各行可并行读出。这使读出速度大幅提升、功耗与发热更低。
早期 CMOS 因每个像元的放大电路占据感光面积,填充因子低、QE 偏低,且各像元放大器不一致带来固定模式噪声(fixed pattern noise, FPN)。近十余年,**背照式(back-side illumination, BSI)工艺将布线层移到光电二极管背面、配合微透镜(microlens)**聚光,QE 已追平甚至超过 CCD;制造工艺成熟也使读出噪声降至 1–3 e⁻ 量级。如今 CMOS 在天文领域已成绝对主流,CCD 基本退出新品市场。
| 对比项 | CMOS | CCD |
|---|---|---|
| 读出结构 | 每像元自带放大器,并行读出 | 电荷逐行移位至边缘放大器 |
| 读出噪声 | 低,可低至约 1 e⁻ | 较低且均匀,通常约 5–15 e⁻ |
| 读出速度 | 快,适合行星与短曝光叠加 | 慢 |
| 功耗与发热 | 低 | 高 |
| 满阱容量 | 偏小(像元小时) | 通常较大 |
| 放大器辉光 | 旧型号有,新型号多已消除 | 几乎没有 |
| 现状与价格 | 主流,性价比高 | 退居小众/二手,逐渐停产 |
单色与彩色(OSC)
Section titled “单色与彩色(OSC)”天文相机按取色方式分为两类:单色(monochrome, mono)与彩色(one-shot color, OSC)。
拜耳阵列与去马赛克
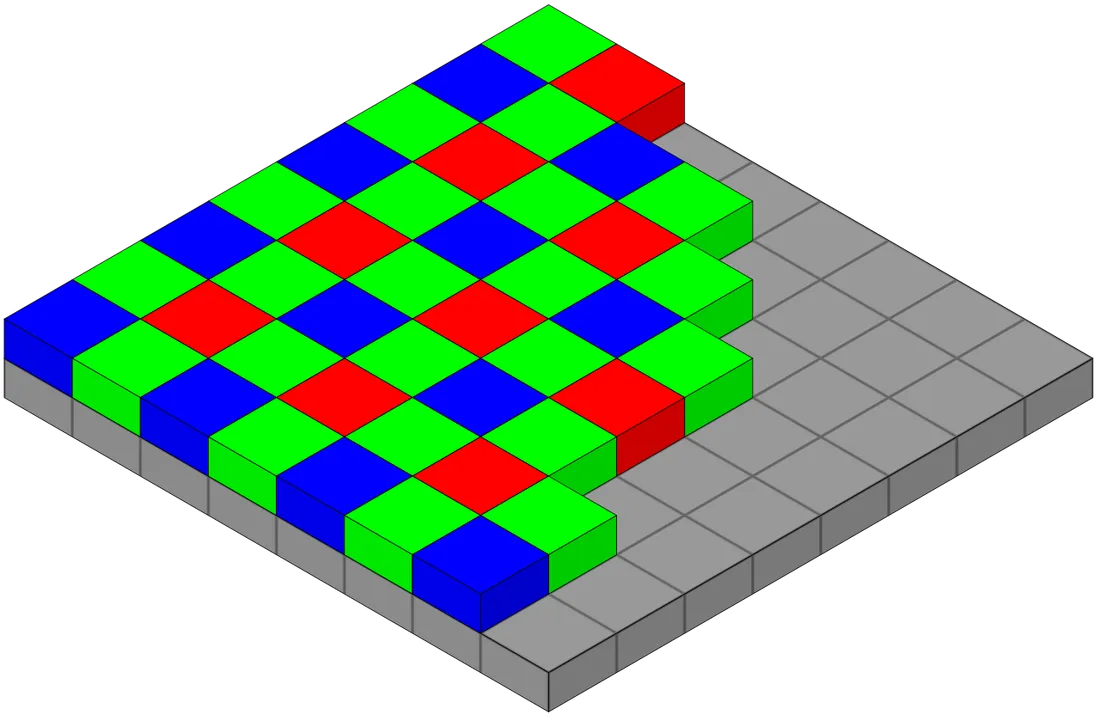
Section titled “拜耳阵列与去马赛克”彩色相机在传感器表面覆盖拜耳阵列(Bayer filter array):每个像元上方覆盖一片红、绿或蓝微滤镜,以 2×2 为重复单元按 RGGB 排列,其中绿色占 50%、红色与蓝色各占 25%。绿色占比更高是为了贴合人眼对亮度(主要由绿光决定)更敏感的特性。
因每个像元只记录一种颜色,需通过去马赛克(demosaicing,又称去拜耳 debayer)算法,由相邻像元插值出每个像元缺失的另外两个颜色通道,才能还原完整 RGB 图像。去马赛克在边缘等高对比区域可能产生伪色(false color)、**拉链效应(zippering)与摩尔纹(moiré)**等伪影。
单色与 OSC 的取舍
Section titled “单色与 OSC 的取舍”单色相机不带拜耳阵列,所有像元接收全波段光,因此单位面积接收的信号量高于彩色相机(彩色相机每个像元被微滤镜挡掉了约 2/3 波段)。成彩色图时,单色相机需配滤镜轮(filter wheel),逐一拍摄 L(亮度)、R、G、B 通道或窄带通道(如 Hα/OIII/SII)后合成。这带来更高的灵敏度、分辨率与窄带能力,代价是设备成本(相机+滤镜轮+多片滤镜)与拍摄、处理工作量更大。
经验上,用好的 OSC 相机充分发挥可达到单色方案约 80% 的成像质量;剩余的提升需要在时间与预算上额外投入。OSC 一次曝光即得彩色,所需总帧数更少,在可用晴夜较短或场地受限时更有优势。
| 对比项 | 单色 mono + 滤镜轮 | 彩色 OSC |
|---|---|---|
| 取色方式 | 全像元接收,逐通道拍摄后合成 | 拜耳阵列单次成像后去马赛克 |
| 信号利用率 | 高(无微滤镜遮挡) | 较低(每像元仅一种颜色) |
| 有效分辨率 | 高(无颜色插值) | 略低(插值还原) |
| 窄带成像 | 强项(可分通道拍 SHO/HOO) | 受限(需双窄带滤镜) |
| 出图便捷度 | 低(多通道+合成) | 高(一次成像) |
| 设备成本与流程 | 高,流程复杂 | 低,流程简单 |
| 适合人群 | 进阶、追求画质、窄带 | 入门、便携、城市光污染下 |
若打算深入窄带成像(Hα/OIII/SII),单色配窄带滤镜通常是必经之路,详见窄带成像。
关键性能参数
Section titled “关键性能参数”**量子效率(QE)**指传感器把入射光子转换为可用光电子的比例,以百分比表示,且随波长变化(通常给出峰值 QE)。QE 越高越灵敏。现代背照式 CMOS 峰值 QE 可达 80%–91%,正照式约 50%–70%。
**读出噪声(read noise)**是每次读出像元时引入的随机噪声,单位为电子(e⁻)。它与曝光时长无关,每张都会叠加。读出噪声越低,越能用”多张短曝光叠加”逼近单张长曝光的效果,也越能压低单帧曝光时间以应对追踪误差或光污染。现代 CMOS 读出噪声常在 1–3 e⁻。
暗电流与制冷
Section titled “暗电流与制冷”即使无光,硅材料的热运动也会持续产生电子,即暗电流(dark current),单位常为 e⁻/像元/秒。暗电流随温度升高近似指数增长(约每升高 6–7°C 翻倍),曝光越长、温度越高越严重,且伴随随机的热噪声。
**制冷相机(cooled camera)用热电制冷器(thermoelectric cooler, TEC,即帕尔贴元件)**把传感器温度降到环境以下,降幅(ΔT)通常可达 30–40°C,并由 PID 算法把温度稳定在设定值(精度可达 0.1°C)。制冷的两点作用:
- 压制暗电流与热噪声,显著改善长曝光信噪比;
- 锁定固定温度,使暗场可建库长期复用——暗场扣除依赖温度一致,这正是制冷相机相对无制冷相机的关键优势。
满阱容量与动态范围
Section titled “满阱容量与动态范围”**满阱容量(full well capacity)**是单个像元在饱和前能容纳的最大电子数,单位 e⁻,决定一个像元能记录多少光而不过曝。像元越大,满阱通常越大。
**动态范围(dynamic range)**是可同时记录的最暗与最亮信号之比,反映一帧中暗部细节与亮部不过曝的兼容能力。其近似计算式为:
动态范围(dB) ≈ 20 × log10(满阱容量 ÷ 读出噪声)
也可用比特(stop)表示:动态范围(stop) ≈ log2(满阱容量 ÷ 读出噪声)。提高满阱或降低读出噪声都能扩大动态范围。
ADC 位深与增益模式
Section titled “ADC 位深与增益模式”**ADC 位深(bit depth)**决定每个像元的电压被量化成多少级灰阶。常见为 12 位(4096 级)、14 位与 16 位(65536 级)。位深不足会在平滑渐变处产生色阶断层(posterization)。
增益(gain)控制单位电子对应多少 ADU(即电子到 ADU 的转换比例,e⁻/ADU)。提高增益可降低有效读出噪声,但会缩小可用满阱、压缩动态范围。许多现代 CMOS 提供双增益(dual conversion gain):
| 模式 | 含义 | 特点与用途 |
|---|---|---|
| HCG | 高转换增益(high conversion gain) | 读出噪声更低、动态范围更优,适合暗弱目标与窄带 |
| LCG | 低转换增益(low conversion gain) | 满阱更大,适合明亮目标、防止高光饱和 |
相机常在某个增益阈值处自动从 LCG 切到 HCG,从而在该点附近兼顾低读噪与大满阱。
像元缺陷与固定模式噪声
Section titled “像元缺陷与固定模式噪声”- 坏点/热点(hot pixel / dead pixel):个别像元因制造缺陷或暗电流偏高,即使无光也读出异常高(热点)或恒为低(坏点)。热点随温度与曝光时长增多,属可重复信号,可用暗场或坏点图(bad pixel map)校准。
- 固定模式噪声(FPN):由各像元放大器、增益不一致造成的、空间上固定的图样,可通过平场(flat frame)与暗场校准减弱。
像元尺寸、采样率与像元合并
Section titled “像元尺寸、采样率与像元合并”像元尺寸(pixel size,单位 μm)与望远镜焦距(focal length,单位 mm)共同决定采样率(sampling,又称图像比例 image scale)——每个像元对应的天空角度,单位角秒每像元(″/px):
采样率(″/px) ≈ 206.265 × 像元尺寸(μm) ÷ 焦距(mm)
像元过小相对于光学分辨率与视宁度会”过采样(oversampling)“,每个像元收光少、单帧信噪比下降;像元过大则”欠采样(undersampling)“,损失分辨率细节。深空成像常以 1″–2″/px 为合理区间(具体取决于视宁度与导星精度)。像元与焦距、视场的关系参见光学基础。
**像元合并(binning)**把相邻 N×N 个像元合并为一个更大的”超级像元”,以分辨率换信噪比:
| 类型 | 实现方式 | 特点 |
|---|---|---|
| 硬件合并(hardware binning) | 读出前在芯片上合并电荷(CCD 典型) | 读出噪声只算一次,信噪比增益最大,速度更快 |
| 软件合并(software binning) | 读出后在数据上相加/平均(CMOS 常见) | 灵活、可后期进行,但读出噪声按每像元各自计入 |
CMOS 多为软件合并,信噪比改善不如 CCD 硬件合并显著,但仍可在欠采样可接受时提升单帧信噪比与帧率,对窄带或视宁差的夜晚有帮助。
三类相机的定位
Section titled “三类相机的定位”| 类型 | 主要特点 | 适合用途 |
|---|---|---|
| 专用天文相机 | 带 TEC 制冷、QE 高、有单色/OSC 之分、可配滤镜轮 | 深空长曝光主力 |
| 单反/微单(DSLR/无反) | 通用便携、无制冷、自带拜耳彩色 | 入门、星野、银河、星座广角 |
| 行星相机 | 高帧率、像元小、通常无制冷、可裁剪感兴趣区域(ROI) | 行星、月面”幸运成像(lucky imaging)” |
专用天文相机针对长曝光优化:制冷压制暗电流、可建暗场库,单色机型配滤镜轮可做窄带,是深空的主力工具。
单反/微单通用便携,但出厂的**红外截止滤镜(IR-cut filter,又称热镜 hot mirror)**会大幅削弱 656nm 的 Hα 红光,拍发射星云偏弱;且无制冷,长曝热噪声明显。**改机(astro-modification)**指更换或移除该滤镜:典型方案把 Hα 透过率从约 22% 提升到约 90%(约 4 倍),显著增强发射星云表现;但改机后白天拍摄需加装校色滤镜,且失去厂家保修。
行星相机针对短曝光高帧率优化:像元小、读出快,可裁剪小**感兴趣区域(region of interest, ROI)**以进一步提速,通常无制冷(短曝光下暗电流影响小)。其工作方式是”幸运成像”——以每秒数十至上百帧录制视频,事后挑选大气湍流瞬时稳定的少数清晰帧叠加,以对抗视宁度抖动。
理清传感器的架构与参数,就能把光学(焦距、口径)、曝光(增益、单帧时长)与后期(暗场、平场校准、叠加)串成完整链条。可回到摄影基础,或前往拍摄入门继续。
- Image sensor — Wikipedia:CMOS 有源像素传感器与 CCD 移位读出原理、背照式工艺、动态范围与噪声等基础概念。
- Bayer filter — Wikipedia:拜耳阵列 RGGB 排列、绿占 50% 的依据、去马赛克与常见伪影。
- CCD vs. CMOS Detectors in Astronomical Photometry — ICO Optics:天文应用中 CMOS 与 CCD 在 QE、读出噪声、放大器辉光与像元尺寸上的对比。
- Quantum Efficiency, Read Noise, and why they are important — Altair Astro:QE、读出噪声、增益与位深的定义及典型数值。
- Astro Cameras: OSC vs. Mono — Cosgrove’s Cosmos:单色与 OSC 在信号利用率、窄带能力与流程上的实拍取舍。
- What Is An Astro Modified DSLR Camera? — Skies & Scopes:单反改机原理与 Hα 透过率提升的量化数据。