本站内容按主题树组织(天文基础、观测、深空天体、天文摄影、参考),但学习一项技能通常需要按特定顺序阅读分散在不同分支下的页面。本页把这些页面串成五条有序的学习路径,作为导航中枢:每条路径对应一个明确目标,列出依次阅读的页面与站内链接,并说明各步骤要解决的问题。
路径只列关键页面,用于判断”下一步该读什么”;页内的延伸概念由各页自身的链接继续展开。五条路径之间可以串联:走完观测基础后,可直接进入任一条天文摄影路径。
先确定当前目标后再选路径:仅用肉眼或双筒认识夜空,选路径一;没有器材但想获得深空图像,选路径二;已购置赤道仪与相机,选路径三;想拍行星、月球、太阳,选路径四;想在光污染下拍发射星云并做通道合成,选路径五。无法确定时,先读入门导航 。
下表给出五条路径的目标、所需器材与产出,便于横向比较。
路径 目标 所需器材 主要产出 一 观测基础 识别夜空、理解视运动与可见性 无(可选双筒) 方位感与观测计划能力 二 远程深空 不购置器材获取深空数据 无(租用远程平台) 一张经处理的深空图像 三 自有器材深空 用赤道仪与相机建立完整流程 赤道仪、望远镜、相机 自主采集与处理的深空图像 四 行星摄影 记录行星、月球、太阳表面细节 长焦镜、巴罗镜、高速相机 高分辨率行星/月面图像 五 窄带深空 在光污染下拍发射星云并调色 单色相机、滤轮、窄带滤镜 SHO/HOO 合成的星云图像
路径一 观测基础
星座、视运动、星等、坐标与半球可见性。不需要望远镜或相机,是其余路径的共同前置。
路径二 远程深空
租用远程平台获取原始数据,重点学习选目标、交付 FITS、校准与叠加,绕开器材与天气。
路径三 自有器材深空
按光学、传感器、曝光、采集、校准、叠加、后期建立从采集到成片的完整流程。
路径四 行星摄影
幸运成像(lucky imaging)流程:超长等效焦距取景、高帧率录像、选帧叠加与小波锐化。
路径五 窄带深空
窄带滤镜、单色相机、分通道采集与 SHO/HOO 通道合成。
目标:能识别常见星座,理解天体的视运动、星等、坐标与可见性。不需要任何器材,双筒望远镜可作为可选辅助。这条路径是后续四条路径的共同基础:选目标、判断”今晚能不能拍”都依赖这里的概念。
认识星座 —— 用亮星与星座建立方位感,理解 88 个国际天文学联合会(IAU)星座如何划分全天。天体视运动 —— 周日运动(地球自转,约 23h56m 恒星日)与周年运动(地球公转),解释天体为何东升西落、星空为何随季节变化。星等系统 —— 视星等(apparent magnitude, m)为对数标度,数值越小越亮,差 5 等亮度差 100 倍;肉眼极限约 6 等,用于判断目标可见性。天球坐标 —— 赤经(right ascension, RA)与赤纬(declination, Dec)构成赤道坐标系,是定位天体的”经纬度”;配合时角与高度方位角理解天体在天空中的位置。半球可见性 —— 由观测纬度 φ 与目标赤纬 δ 判断天体能否升起:δ > 90° − φ 为拱极星(永不落),δ < φ − 90° 为永不升起。目视观测技巧 —— 暗适应(约 20–30 分钟)、余光瞥视(averted vision)、记录方法与星图使用。
北天极 NCP 南天极 SCP 天赤道 黄道 地球 天体 P +Dec RA → 赤道坐标系:赤经/赤纬如同天空的经纬度,是路径一第 4 步与所有选目标操作的核心。
目标:在不购置望远镜的前提下,通过远程平台租用专业级器材采集深空原始数据,并完成从选目标到成片的处理。这条路径绕开了器材购置、调试、极轴校准、暗空地点与天气值守,适合先验证兴趣、快速获得第一张深空图像。
远程平台入门 —— 理解”在云端租望远镜”的运作方式:平台在暗空台址部署设备,用户在线下达拍摄任务并下载数据。平台对比 —— 按预算、器材规格、台址 Bortle 等级与计费模式选择服务商。天体目录选目标 —— 从梅西耶(Messier, M)、NGC、IC 等目录中选一个当季可见、对初学者友好的目标(如 M31、M42、M45)。提交拍摄任务 —— 按平台要求设置目标坐标、滤镜、单张曝光时长与张数,等待原始子帧(raw frames,通常为 FITS 格式)交付。多数平台已完成跟踪与导星,用户主要负责曝光参数。预处理与叠加 —— 将数十张子帧配准(registration)后用 sigma 裁剪等方法叠加(integration),剔除卫星、飞机等离群信号,提升信噪比。后期处理流程 —— 在叠加主图上做背景梯度校正、非线性拉伸(stretch)、色彩校准与降噪。
目标:使用赤道仪(equatorial mount)与相机,建立从采集到处理的完整深空摄影流程。相比远程路径,这条路径需要逐项掌握器材原理与现场操作,换来对全流程的完全掌控。
光学基础 —— 焦距(focal length)、口径(aperture)与焦比(f-ratio = 焦距 ÷ 口径)决定视场、集光力与所需曝光;像场大小决定能容纳的目标范围。传感器基础 —— CMOS 像素尺寸、量子效率(QE)、读出噪声(read noise)与满阱容量;彩色(OSC)与单色(mono)相机的取舍。曝光与增益 —— 单张曝光时长、增益(gain)与子帧数量的权衡;目标是让背景信号足以淹没读出噪声,同时避免亮星过曝。DSO 拍摄实操 —— 极轴校准(polar alignment)、构图取景、巴氏面具(Bahtinov mask)对焦、自动导星(autoguiding, 如 PHD2)与抖动(dithering)采集序列。校准帧 —— 暗场(dark)去除热噪声与暗电流,平场(flat)校正渐晕与灰尘暗影,偏置帧(bias)记录读出基底,用于在叠加前标定每张子帧。叠加 —— 将校准后的子帧配准并积分为单张高信噪比主图。后期处理流程 —— 背景校正、拉伸、色彩平衡、星点处理与降噪,得到成片。
深空长曝的清晰度首先取决于跟踪精度。赤道仪需要先做极轴校准,使其旋转轴对准天极,以抵消地球自转;欠佳的极轴或跟踪会导致星点拖线,任何后期都无法挽回。在器材投入中,赤道仪通常比镜头或相机更值得优先保证。
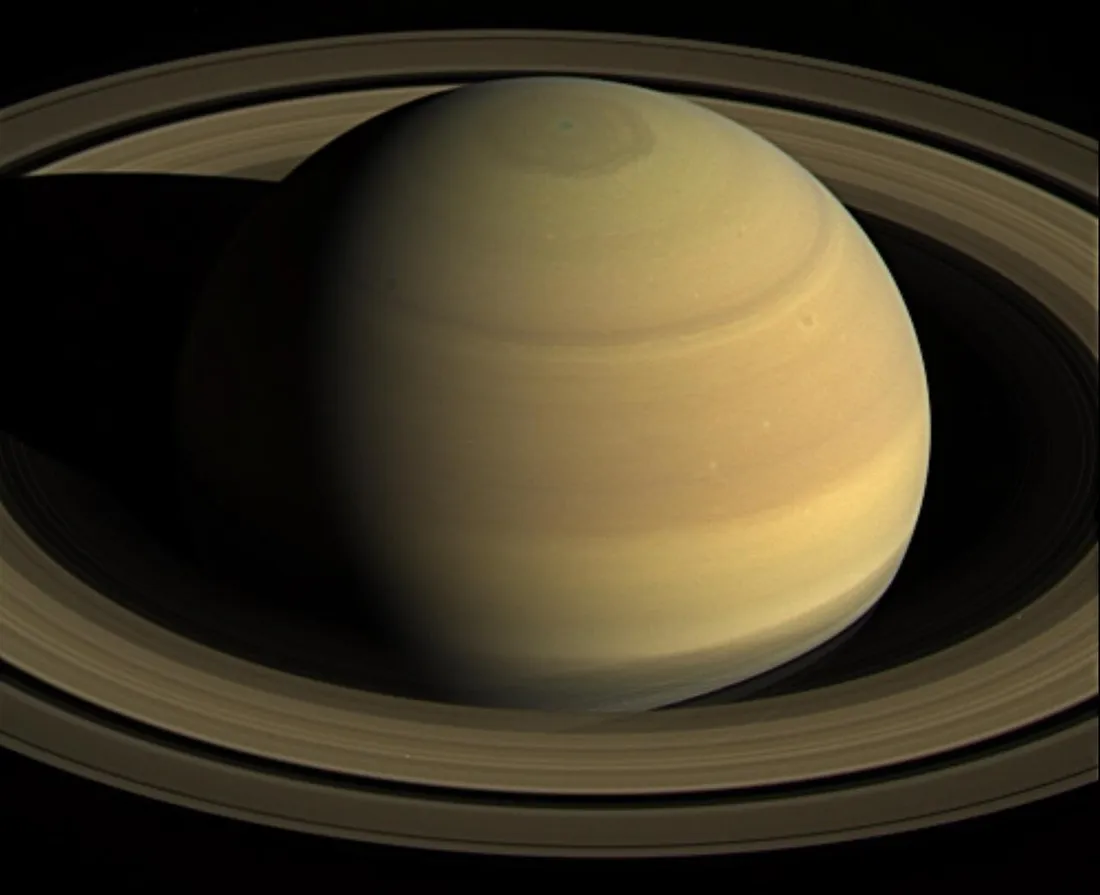
目标:记录土星环、木星云带、月面环形山与太阳表面细节。行星摄影与深空摄影在方法上相反:目标明亮但角直径小,需要超长等效焦距与高放大率,并采用幸运成像(lucky imaging)——录制高帧率视频,再用软件按清晰度筛选并叠加少数最清晰的帧,以对抗大气视宁度造成的抖动。
光学:焦距与巴罗镜 —— 行星需要很高的有效焦比(常用 f/15 至 f/30),通过巴罗镜(Barlow)或加倍镜延长等效焦距;目标亮度高,放大不必担心曝光不足。行星/月球/太阳拍摄 —— 高帧率录像(数十至上百 fps)、ROI 裁切只读出目标区域以提速、抓住大气稳定的短窗口;太阳须配专用太阳滤镜或赫歇尔棱镜。关键后期 —— 用 AutoStakkert! 自动评分并选取最清晰的一批帧叠加,再用小波(wavelet)锐化(如 RegiStax 或 PixInsight 的相应工具)逐层提取细节;木星自转快,长序列需做去自转(derotation)处理。详见后期技术 。
土星:环与本体亮度差明显,小波锐化需控制层级强度以避免伪影与噪声放大。
图源 NASA/JPL-Caltech/Space Science Institute · Public domain 木星:自转周期约 9.9 小时,云带细节多,常用于练习幸运成像与去自转叠加。
图源 NASA, ESA, and A. Simon (Goddard Space Flight Center) · Public domain
影响行星清晰度的首要因素是大气视宁度(seeing),即大气湍流对星像的扰动。口径与焦距决定理论分辨率,但视宁度差时无法稳定呈现细节;幸运成像正是为筛掉湍流恶化的帧而生。拍摄前应判断观测条件,详见观测条件 。太阳拍摄涉及不可逆的失明风险,务必使用经认证的专用滤镜。
目标:使用窄带滤镜采集发射星云的特定发射线(Hα、OIII、SII),在光污染环境中获取高对比度信号,并掌握分通道合成与 SHO/HOO 调色。这条路径建立在路径三的器材与流程之上,是对发射星云目标的专门深化。
信噪比(SNR) —— 理解 SNR ∝ √N:信噪比随有效子帧数 N 的平方根增长。窄带滤镜透过带宽窄(常为 3–7 nm),信号微弱,这是其需要很长总曝光的理论根基。传感器(单色 mono) —— 窄带通常用单色相机配电动滤轮分通道采集;单色传感器无拜耳阵列,灵敏度与分辨率高于同型彩色相机。窄带成像 —— 分别采集 Hα(656.3 nm,电离氢,信号最强)、OIII(约 500.7 nm,双电离氧,蓝绿色)、SII(约 671.6 nm,单电离硫,信号最弱);月光与城市光污染对窄带影响小,可在非新月期拍摄。星云 —— 了解发射星云、行星状星云与超新星遗迹的物理机制与典型窄带目标。后期关键技术 —— SHO 通道映射(SII→R、Hα→G、OIII→B,即”哈勃色”)与 HOO 映射、绿色溢出抑制(SCNR)、星点分离与通道合成。
叠加张数 N 相对信噪比 (∝√N) 1 ×1 4 ×2 16 ×4 36 ×6 64 ×8 信噪比随子帧数 N 以平方根增长。这解释了窄带成像(尤其是信号最弱的 SII)通常需要很长的累计曝光时间。
SHO(哈勃色)
SII → R 通道
Hα → G 通道
OIII → B 通道
HOO(双窄)
Hα → R 通道
OIII → G 通道
OIII → B 通道
窄带 SHO 调色:把 SII / Hα / OIII 映射到 R / G / B,得到标志性的哈勃色;HOO 则把 Hα 映射到红、OIII 映射到绿与蓝。
在 SHO 合成中,SII 几乎总是最弱的信号,被映射到红通道;若 SII 曝光不足,红通道会出现明显颗粒噪声。Hα 通常最强且被映射到绿通道,合成后常需用绿色溢出抑制(SCNR)去除整体绿偏。规划曝光时应给 SII 留出更多时间。
走完任意一条路径后,以下索引页用于持续深入与横向拓展。